"自動運転"車、日本初販売の裏側
日産自動車は、自動運転技術を搭載車をトヨタより早く8月下旬に発売するという記事が出た。
確かに、販売として、トヨタが遅れたのかもしれない。
しかし、技術が遅れを取っているのか?そこには疑問がある。
一方、日産は、なぜ、販売を急いだのか?その狙いは何か興味深い。
日産、"自動運転"を「セレナ」に搭載する意味
http://toyokeizai.net/articles/-/127629
2016年07月16日 東洋経済
日産自動車は国内自動車メーカーとして初めて、自動運転技術を搭載した自動車である新型「セレナ」を8月下旬に発売する。
というのは、トヨタの自動運転技術に関する記事は多くあって、それによれば、
日産のレベル3(半自動運転)を超えて、レベル4(完全自動運転)に取り組んでいる。
つまり、日産が取り組んでなさそうな人工知能にも踏み込み、「自動運転」でなく「自律走行」に踏み込んでいる。
テスラの技術、自動運転向け人工知能の特許技術はなさそう
テスラに自動運転自動車が話題になっている。そこで、保有する特許があるのか調べてみた。
とりあえず、日本の特許で調べてみた。結果、下表の15件のみで「人工知能」*「車」の特許がなかった!
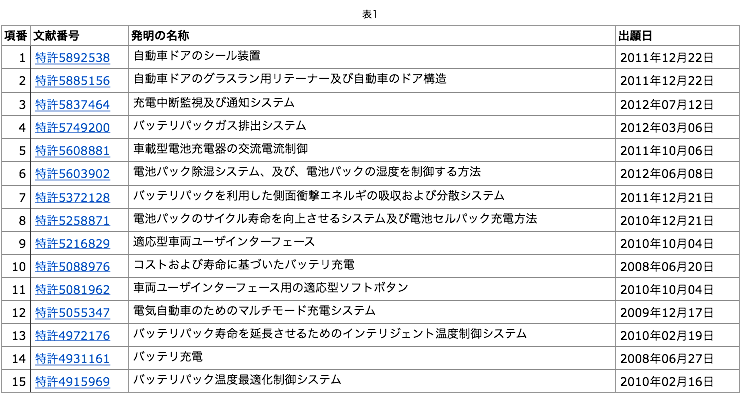
ユーザーインターフェースの特許が多く、人工知能の技術そのものの特許がなさそう。
他社の技術を導入しているのか?不明。
「死亡事故の自動運転車」報道、誤報!
なんだ、誤報だったのか!
死亡事故のテスラは自動運転車ではなかった 出典;Newsweek日本版
今年5月にフロリダ州で発生した交通事故で、運転支援機能が搭載されたテスラのセダンのドライバーが死亡していたことについて、多くのメディアが「自動運転で初めての死亡事故」と報道した。ここで理解しておかなくてはならないのが、事故にあったテスラは自動運転車ではないことだ。アメリカ運輸省高速道路交通安全局(NHTSA)が「レベル4」や「レベル3」と区分している自動運転車、つまり「走行中に、安全上必要なすべての動作を自動で行う」ものでも、「特定の状況で、安全上必要なすべての動作を行う」ものでもない。
メディアは、自動運転車が事故を起こすことが話題になるので、焦ったようですね。
とはいえ、自動運転車が事故を起こすことはいつか来ます。
問題になるのは、人工知能の暴走でしょう!
自動走行、初めて死亡事故
自動走行、初めて死亡事故を起こしたという記事が入ってきた。
やはり、人工知能は、まだまだだ!と思った方もいると思います。
記事によれば、
原因は、米高速道路交通安全局(NHTSA)が調査中とのことで現時点不明であるが、
死亡したトレーラーが斜行してきたとあり、自動運転車側が事故を引き起こしたではない模様。
今回の事故まで、テスラは「約2億1000万キロ・メートルの走行実績がある」らしく、
自動運転の実力は、実用レベルであることは、概ね検証されてきていると思われた。
日立にもあった「自律走行の基本特許」
自律走行の基本特許は、Googleにあるとして前回ブログに書いたが、それだけではなさそうだ。
今回調べて発見したのは、日立の特許で、すでに登録しているもの。
技術内容は、ざっくり言えば、障害物に衝突しないように速度を変えるというもので、
必要な用件だと考え、基本特許と思った。
しかし、気になるのは、人工知能が速度を決定する車両は、
その販売をするメーカーがこの特許を使っていると言えるのか?疑問になりました。
プログラム上、どこにもそれを証明できるものがないため。
日立の特許の詳細は以下に抜粋した。
皆さんは、基本特許と思いますか?
【特許番号】特許第5830533号(P5830533)
【登録日】平成27年10月30日(2015.10.30)
【発明の名称】自律移動システム
【出願日】平成23年5月31日(2011.5.31)
(57)【特許請求の範囲】
【請求項1】
自律移動体の周囲の環境情報を取得する環境情報取得手段と、基準経路が登録された地図情報を保持する記憶情報処理手段と、前記環境情報と前記地図情報に基づき前記自律移動体の自己位置を推定する自己位置推定手段と、前記環境情報に基づき障害物の情報を検出する障害物検出手段と、前記自己位置と前記障害物の情報と前記基準経路の情報に基づき移動方向を決定する経路決定手段と、前記障害物情報に基づき移動速度を決定する速度決定手段と、前記移動方向と前記移動速度に基づき自律移動体の移動を制御する車両制御手段とを備えた自律移動システムにおいて、
前記経路決定手段は、
前記自律移動体の現在位置から前記基準経路に追従するための追従移動方向に存在する前記障害物を回避するため、複数の移動方向について、所定の通行幅以上を有して障害物の侵入のない通行距離と通行幅からなる通行領域を算出して、前記追従移動方向と前記通行領域に基づき前記自律移動体の移動方向を決定し、
前記速度決定手段は、
前記自律移動体の制動条件と前記障害物の前記自律移動体に対する位置と前記障害物が移動する速度に応じて、前記自律移動体が前記障害物との衝突前に停止可能な移動速度を決定することを特徴とする自律移動システム。
自律走行車のGoogleの基本特許
自律走行車は、公道実験段階にあり、もちろん、特許出願は出ていることは明らか。
その基本特許があるのではと思って、日本の特許で調べてみた。
車両間連特許が16件くらい発見された。
出願日でみて最初の数件の権利内容を確認してみたら、自律走行車の基本特許になると思った。
まだ登録になっていない審査中のもの。ただし、米国では、登録されているので、権利化される可能性は十分ある。
その1件は以下である。
請求項1が基本特許になり得るのかを解析してみたので説明する。
赤字部は、必須用件。青字部は、余分な用件?。ではないと思う。この時代の背景から必須用件になる。
よって、このまま登録すれば、基本特許になると私は思った。
特表2013-544695
(43)【公表日】平成25年12月19日(2013.12.19)
(54)【発明の名称】ゾーンドライビング
(32)【優先日】平成22年10月5日(2010.10.5)
(71)【出願人】グーグル・インク
【請求項1】
車両を操縦する方法であって、該方法は、
1つ以上のゾーンであって、各ゾーンは前記車両のコントロール形態をドライバーがコントロールすべきことを示す規則に関連付けられていることを特徴とするゾーンを含む地図情報にアクセスするステップと、
プロセッサーにより、前記地図情報に基づくルートを特定するステップであって、該ルートは、前記車両が前記1つ以上のゾーンの内の少なくとも1つのゾーンを通過する必要があることを特徴とするステップと、
プロセッサーにより、前記車両を目的地まで操縦するステップと、
前記車両が前記少なくとも1つのゾーンのルートに沿う所定の距離の範囲内に入ったとき、前記少なくとも1つのゾーンに関連付けられた規則を特定し、該特定した規則のコントロール形態を特定し、前記少なくとも1つのゾーンを通過するあいだ、前記特定したコントロール形態をコントロールすることの必要性をドライバーに知らせるステップと、
を具備することを特徴とする方法。
自律運転の法整備へ
自律運転は、現時点、法で認められていません。しかし、改正される方向のようです。
でも、特区で特別に実証実験が進められたりしていて、国も認める準備をしている。
1949年ジュネーブ道路交通条約(抜粋)
第8条: 第8.1条:一単位として運行されている車両又は連結車両には、それぞれ運転者がいなけ
ればならない。第8.5条:運転者は、常に、車両を適正に操縦し、又は動物を誘導することができなけれ
ばならない。運転者は、他の道路使用者に接近するときは、当該他の道路使用者の安全
のために必要な注意を払わなければならない。第10条:車両の運転者は、常に車両の速度を制御していなければならず、また、適切かつ
慎重な方法で運転しなければならない。運転者は、状況により必要とされるとき、特に見とおしがきかないときは、徐行し、又は停止しなければならない。
道路交通法(昭和三十五年六月二十五日法律第百五号)(抜粋)
(安全運転の義務)
第七十条車両等の運転者は、当該車両等のハンドル、ブレーキその他の装置を確実に操作し、かつ、道路、交通及び当該車両等の状況に応じ、他人に危害を及ぼさないような速度と方法で運転しなければならない。
<参考>NHTSA(米国運輸省道路交通安全局)の提言(2013年5月)
• NHTSA(米国運輸省道路交通安全局)では、2013年5月30日に自動運転に関する一次政策方針を公表した。
• NHTSAの自動運転に係るスタンスでは、現時点での半自動運転、完全自動運転の基準策定は時期尚早としている。
http://daily.2ch.net/test/read.cgi/newsplus/1463729946/
政府は自動運転の技術を使ったタクシーなどの乗客を運ぶサービスについて、万が一、事故が起きた場合には事業者がすべての責任を負うことなどを条件に、2020年までに実用化を認めることになりました。
世界中で開発競争が進む自動運転を巡っては、大手自動車メーカーだけでなく、IT企業なども無人のタクシーやバスなどの実用化を目指しています。
こうした自動運転技術を使った乗客を運ぶサービスについて、政府は一定の条件を満たせば、東京オリンピック・パラリンピックが開かれる2020年までに実用化を認めることになりました。